
Dynamical System Simulator
10 ພັນ+
ດາວໂຫຼດ

PEGI 3
info
ກ່ຽວກັບແອັບນີ້
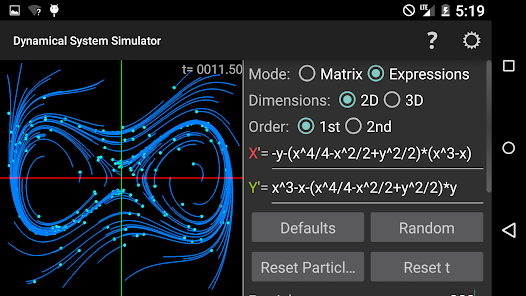
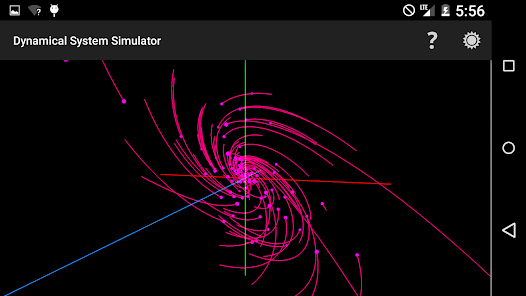
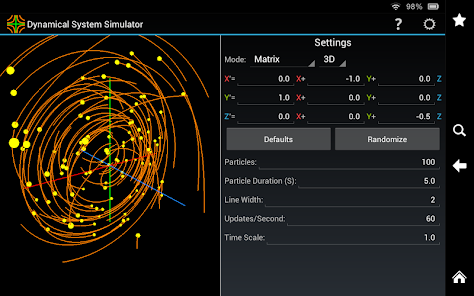
Dynamical System Simulator animates 2D ແລະ 3D ລະບົບຄໍາສັ່ງທໍາອິດແລະລໍາດັບທີສອງຂອງສົມຜົນທີ່ແຕກຕ່າງກັນໃນເວລາຈິງ. ສັງເກດເບິ່ງອະນຸພາກເຄື່ອນໄຫວເຄື່ອນທີ່ຜ່ານອາວະກາດທີ່ປ່ອຍໃຫ້ເສັ້ນທາງໃນຕື່ນ. ດີເລີດສຳລັບການຢັ້ງຢືນພື້ນທີ່ຄວາມຊັນ, ການຖ່າຍຮູບໄລຍະ, ແລະຄວາມເຂົ້າໃຈທີ່ເຂົ້າໃຈງ່າຍຂອງລະບົບໄດນາມິກ. ຄວາມຮູ້ກ່ຽວກັບສົມຜົນຄວາມແຕກຕ່າງແມ່ນສົມມຸດວ່າແຕ່ຫນ້າຈໍຊ່ວຍເຫຼືອຈະຊີ້ໃຫ້ທ່ານໄປຫາແຫຼ່ງຂໍ້ມູນເພີ່ມເຕີມ. ແອັບດັ່ງກ່າວໄດ້ຖືກໂຫຼດມາລ່ວງໜ້າດ້ວຍການຕັ້ງຄ່າລະບົບໄດນາມິກທີ່ຮູ້ຈັກກັນດີຫຼາຍຢ່າງທີ່ສາມາດເລືອກໄດ້ຈາກລິ້ນຊັກນຳທາງ. ພາລາມິເຕີສໍາລັບປະເພດຂອງລະບົບໂດຍສະເພາະສາມາດສຸ່ມໄດ້.
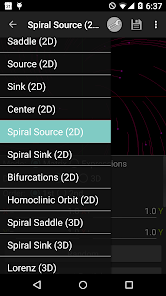
ລະບົບຕົວຢ່າງ:
• ປະຊາກອນ Logistic (1D)
• ການເກັບກ່ຽວແຕ່ລະໄລຍະ (1D)
• Saddle (2D)
• ແຫຼ່ງທີ່ມາ (2D)
• ອ່າງລ້າງ (2D)
• ກາງ (2D)
• ແຫຼ່ງກ້ຽວວຽນ (2D)
• Spiral Sink (2D)
• Bifurcations (2D)
• Homoclinic Orbit (2D)
• Saddle ກ້ຽວວຽນ (3D)
• Spiral Sink (3D)
• Lorenz (3D)
• ການສັ່ນສະເທືອນ (3D)
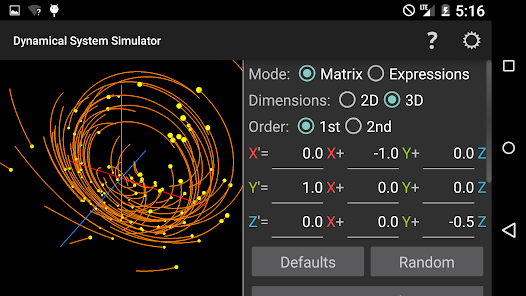
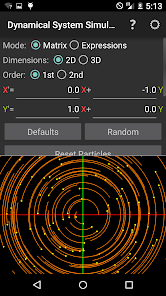
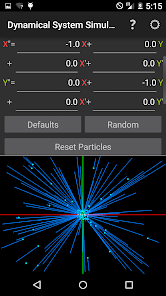
ການຕັ້ງຄ່າໂໝດ:
• Matrix (linear) / Expressions (linear ຫຼື non-linear)
• 2D / 3D
• 1st Order / 2nd Order
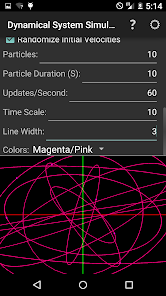
ການຕັ້ງຄ່າການຈໍາລອງ:
• ຈໍານວນອະນຸພາກ
• ອັດຕາການປັບປຸງ
• ຂະໜາດເວລາ (ລວມທັງຄ່າລົບ)
• ເປີດໃຊ້/ປິດການນຳໃຊ້ຄວາມໄວເບື້ອງຕົ້ນແບບສຸ່ມສຳລັບອະນຸພາກ
ເບິ່ງການຕັ້ງຄ່າ:
• ຄວາມກວ້າງຂອງເສັ້ນ
• ສີເສັ້ນ
• ການຊູມ (ດ້ວຍທ່າທາງການຢິບ)
• ເບິ່ງການຫມຸນ (3D ເທົ່ານັ້ນ)
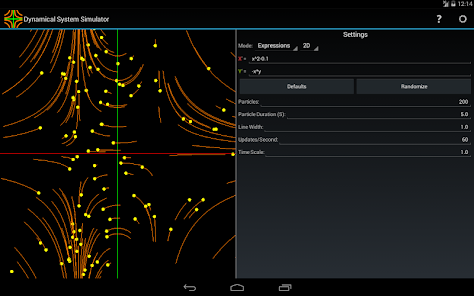
ໃນຮູບແບບການສະແດງອອກ, ສັນຍາລັກດັ່ງຕໍ່ໄປນີ້ແລະຫນ້າທີ່ສາມຫລ່ຽມສາມາດຖືກນໍາໃຊ້:
• x, y, z
• x', y', z' (ຮູບແບບການສັ່ງຊື້ທີ 2 ເທົ່ານັ້ນ)
• t (ເວລາ)
• ບາບ (sine)
• cos (cosine)
• asin (arcsine)
• acos (arccosine)
• abs (ຄ່າຢ່າງແທ້ຈິງ)
ແອັບພລິເຄຊັ່ນນີ້ໄດ້ຖືກສ້າງຂື້ນເມື່ອບໍ່ດົນມານີ້ເພື່ອຜົນປະໂຫຍດຂອງນັກຮຽນ ແລະຜູ້ໃຊ້ຊອບແວອື່ນໆ. ຮູ້ສຶກວ່າບໍ່ເສຍຄ່າທີ່ຈະສົ່ງ PRs ທີ່ມີຄຸນສົມບັດໃຫມ່ຫຼືການແກ້ໄຂຂໍ້ບົກພ່ອງທີ່ https://github.com/simplicialsoftware/systems
ລະບົບຕົວຢ່າງ:
• ປະຊາກອນ Logistic (1D)
• ການເກັບກ່ຽວແຕ່ລະໄລຍະ (1D)
• Saddle (2D)
• ແຫຼ່ງທີ່ມາ (2D)
• ອ່າງລ້າງ (2D)
• ກາງ (2D)
• ແຫຼ່ງກ້ຽວວຽນ (2D)
• Spiral Sink (2D)
• Bifurcations (2D)
• Homoclinic Orbit (2D)
• Saddle ກ້ຽວວຽນ (3D)
• Spiral Sink (3D)
• Lorenz (3D)
• ການສັ່ນສະເທືອນ (3D)
ການຕັ້ງຄ່າໂໝດ:
• Matrix (linear) / Expressions (linear ຫຼື non-linear)
• 2D / 3D
• 1st Order / 2nd Order
ການຕັ້ງຄ່າການຈໍາລອງ:
• ຈໍານວນອະນຸພາກ
• ອັດຕາການປັບປຸງ
• ຂະໜາດເວລາ (ລວມທັງຄ່າລົບ)
• ເປີດໃຊ້/ປິດການນຳໃຊ້ຄວາມໄວເບື້ອງຕົ້ນແບບສຸ່ມສຳລັບອະນຸພາກ
ເບິ່ງການຕັ້ງຄ່າ:
• ຄວາມກວ້າງຂອງເສັ້ນ
• ສີເສັ້ນ
• ການຊູມ (ດ້ວຍທ່າທາງການຢິບ)
• ເບິ່ງການຫມຸນ (3D ເທົ່ານັ້ນ)
ໃນຮູບແບບການສະແດງອອກ, ສັນຍາລັກດັ່ງຕໍ່ໄປນີ້ແລະຫນ້າທີ່ສາມຫລ່ຽມສາມາດຖືກນໍາໃຊ້:
• x, y, z
• x', y', z' (ຮູບແບບການສັ່ງຊື້ທີ 2 ເທົ່ານັ້ນ)
• t (ເວລາ)
• ບາບ (sine)
• cos (cosine)
• asin (arcsine)
• acos (arccosine)
• abs (ຄ່າຢ່າງແທ້ຈິງ)
ແອັບພລິເຄຊັ່ນນີ້ໄດ້ຖືກສ້າງຂື້ນເມື່ອບໍ່ດົນມານີ້ເພື່ອຜົນປະໂຫຍດຂອງນັກຮຽນ ແລະຜູ້ໃຊ້ຊອບແວອື່ນໆ. ຮູ້ສຶກວ່າບໍ່ເສຍຄ່າທີ່ຈະສົ່ງ PRs ທີ່ມີຄຸນສົມບັດໃຫມ່ຫຼືການແກ້ໄຂຂໍ້ບົກພ່ອງທີ່ https://github.com/simplicialsoftware/systems
ອັບເດດແລ້ວເມື່ອ
ຄວາມປອດໄພເລີ່ມດ້ວຍການເຂົ້າໃຈວ່ານັກພັດທະນາເກັບກຳ ແລະ ແບ່ງປັນຂໍ້ມູນຂອງທ່ານແນວໃດ. ວິທີປະຕິບັດກ່ຽວກັບຄວາມເປັນສ່ວນຕົວ ແລະ ຄວາມປອດໄພຂອງຂໍ້ມູນອາດຈະແຕກຕ່າງກັນອີງຕາມການນຳໃຊ້, ພາກພື້ນ ແລະ ອາຍຸຂອງທ່ານ. ນັກພັດທະນາໃຫ້ຂໍ້ມູນນີ້ ແລະ ອາດຈະອັບເດດມັນເມື່ອເວລາຜ່ານໄປ.

ບໍ່ໄດ້ໄດ້ແບ່ງປັນຂໍ້ມູນກັບພາກສ່ວນທີສາມ
ສຶກສາເພີ່ມເຕີມ ກ່ຽວກັບວ່ານັກພັດທະນາປະກາດການແບ່ງປັນຂໍ້ມູນແນວໃດ

ບໍ່ໄດ້ເກັບກຳຂໍ້ມູນ
ສຶກສາເພີ່ມເຕີມ ກ່ຽວກັບວ່ານັກພັດທະນາປະກາດການເກັບກຳຂໍ້ມູນແນວໃດ
ມີຫຍັງໃໝ່
SDK update to support newer Android versions.
ຝ່າຍຊ່ວຍເຫຼືອຂອງແອັບ
ກ່ຽວກັບນັກພັດທະນາແອັບ
SIMPLICIAL SOFTWARE, LLC
76 Cranbrook Rd Ste 251
Cockeysville, MD 21030
United States
+1 443-353-9375





